В данной публикации представлен порядок действий при решении контактных задач в плоской постановке в ANSYS на примере подшипника роликового радиального с короткими цилиндрическими роликами.
 |
Построить подшипник роликовый радиальный с короткими цилиндрическими роликами, рассчитать для него перемещения и напряжения. Решить контактную задачу.
Базовые программные продукты: ANSYS, SolidWorks.
Базовые программные продукты: ANSYS, SolidWorks.
Описание задачи
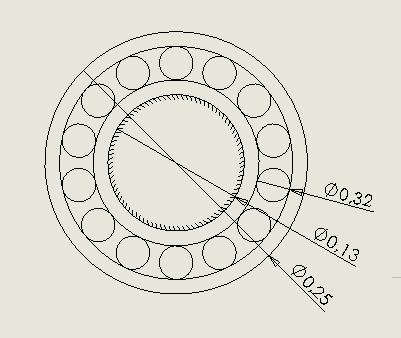
Решить задачу анализа подшипника (Рисунок 1, все размеры в метрах). с изготовлен из Стали ШХ15СГ-Ш ГОСТ 801-78. В качестве нагрузки для наружного кольца задать перемещение величиной м.
м.
м. |
| Рисунок 1. Задача анализа подшипника |
{kind=link}
Ход работы
1. Построение трехмерной модели в SolidWorks
На первом этапе выполнения поставленной задачи была построена трехмерная модель подшипника в SW (Рисунок 2).
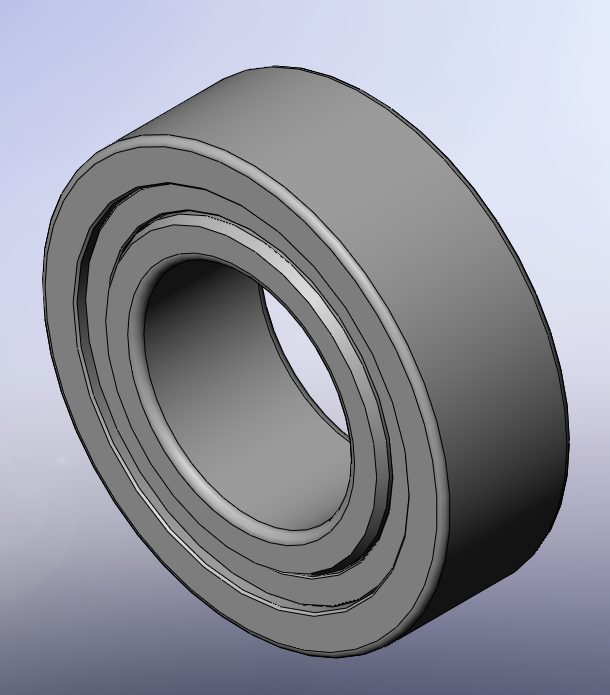 |
| Рисунок 2. Подшипник |
2. Расчет в ANSYS
2. 1. Предварительная обработка: Постановка задачи
a) Строим геометрическую модель снизу вверх:
Схематически составляющие подшипника (наружное и внутреннее кольца, ролики) представим в виде окружностей. Но т.к. модель симметрична, строим правую половину. Строим геометрическую модель сверху вниз:
- Создаем окружности – ролик, внешнее и внутреннее кольца подшипника.
- Ролик разделяем линиями на «четырехугольники». Кольца тоже делим, на сегменты. Это необходимо для дальнейшего разбиения конструкции на четырехугольные конечные элементы.
- Сливаем совпадающие точки, которые принадлежат линиям, выделенным на Рисунке 3 красным цветом. Иначе на их основе будет невозможно построить поверхности.
 |
| Рисунок 3. Совпадающие точки |
- Строим Plane Surface (плоские поверхности), указывая линии, создающие замкнутый контур.
- Также с двух сторон ролика строим по две линии (как показано на Рисунке 4). Для них заданим тип элемента Link11 – аналог пружины, работающий на растяжение-сжатие. Позже это поможет нам зафиксировать нашу конструкцию.
 |
| Рисунок 4. «Пружины» |
- Создаем круговой массив «роликов» (поверхностей) при помощи команды Copy в меню Preprocessor, предварительно сменив декартову систему координат на цилиндрическую. Задаем количество копий равное 14 и угол 360/14 (ось цилиндра совпадает с осью Z, на рис. 5).
- Удаляем левую половину. Результат приведен на Рисунке 5.
 |
| Рисунок 5. Геометрическая модель подшипник |
- Склеиваем поверхности: 3,5 нижних роликов и нижнюю половину внешнего кольца.
 |
| Рисунок 6. Операция склеивания поверхностей |
- Определяем тип элемента:
- Задаем свойства материала:
Так как подшипник изготовлен из стали, вводим модуль упругости Ех=200 ГПа и коэффициент Пуассона PRXY=0,3.
- Определяем размер сетки:
Для линий ролика устанавливаем размер стороны конечного элемента равный 0,001м (это дает около 50 элементов по периметру ролика); для линий колец — 0,002 м. Для линий-пружин задаем количество элементов равное 1.
- Так как ранее была выполнена операция склеивания, линии 10 и 11 были разбиты на четыре части (линии). Объединяем их, используя явную конкатенацию. Это необходимо для проведения упорядоченного разбиения.
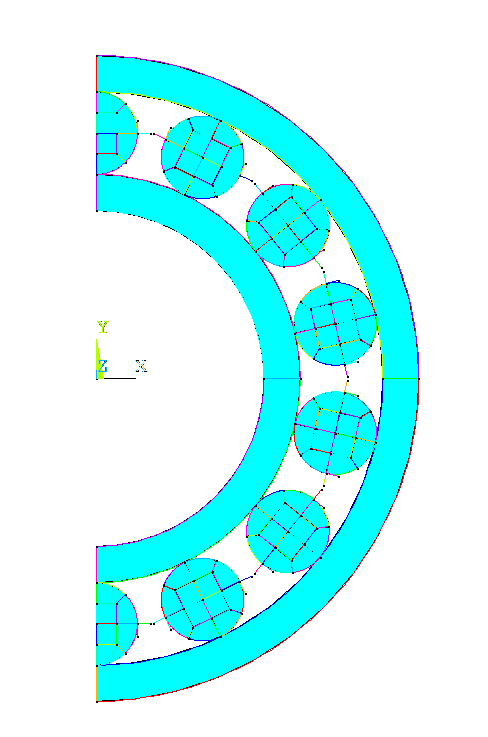
- Разбиваем модель на четырехугольные конечные элементы (Рисунок 7).
 |
| Рисунок 7. КЭ сетка |
Количество элементов – 13 тыс.
Количество узлов – 13 тыс.c) Создание контактных пар:
Контактные задачи решаются с применением итераций, в которых определяются зоны контакта, согласовываются контактные усилия и перемещения. Такие задачи формулируются для двух или большего количества тел. При этом тела могут иметь как конечную (деформируемые тела), так и бесконечную жесткость (жесткое тело или ограничение). В нашей работе рассмотрен контакт 16 деформируемых тел.
- назначаем целевые и контактные линии как показано на Рисунке 8;
- задаем коэффициент трения равный 0,3;
- убираем зазор командой "Close gap" ("выбрать зазор").
 |
| Рисунок 8. Контактные пары |
2. 2. Задание нагрузок и решение
а) Прикладываем граничные условия:- задаем свойство симметрии;
- чтобы закрепить модель, для внутреннего кольца и для точек на концах пружин было задано ограничение жесткая заделка;
- задаем перемещение для наружного кольца вдоль оси У для создания начального контакта двух тел.
 |
| Рисунок 9. Расчетная схема |
б) Указываем тип анализа:
Отмечаем, что будем решать статическую задачу.- Задаем опции решения:
- количество шагов – 10;
- максимальное количество подшагов – 1000;
- минимальное число подшагов – 1.
в) Запускаем решение задачи.
3. Просмотр результатов
Перемещения
|
| Рисунок 10. Перемещения |
Распределение напряжений по Мизесу
 |
| Рисунок 11. Напряжения |
5. Вывод
Максимальные перемещения – 0,112  м.
м.
м.
Максимальные напряжения возникают в зоне контакта и равны 1,470 Па , что меньше допустимых (допустимые напряжения для подшипника – 500МПа). Т.е. при данных нагрузках иследуемую конструкцию можно считать работоспособной
Па , что меньше допустимых (допустимые напряжения для подшипника – 500МПа). Т.е. при данных нагрузках иследуемую конструкцию можно считать работоспособной
в макросе нада половину выкинуть, очень много лишнего
ОтветитьУдалить